
Limitations of Forward Collision-Avoidance Assist
Forward Collision-Avoidance Assist may operate abnormally or unexpectedly in certain circumstances, including the following:
-
A sensor is obscured or damaged.
-
The temperature around the front-view camera is extremely high or low.
-
The camera lens is obscured by a windscreen tint, film, or coating, damaged glass, or objects on the glass such as a sticker or insect.
-
If glass of unverified quality and performance is used
-
If the front camera’s view is obstructed due to tinted film
-
When washer fluid is continuously sprayed or the wipers are operated
-
There is moisture or ice on the windscreen.
-
Heavy rain, snow, or fog obscures the camera’s view.
-
Glare from the sun obstructs the front view camera’s field of view.
-
Light reflects off of a wet road surface, such as a puddle.
-
There is an object on the instrument panel.
-
Your vehicle’s surroundings are excessively bright or dark.
-
The light changes suddenly, such as when you enter or exit a tunnel.
-
You are in dark conditions and your vehicle’s headlights are not on or are obscured.
-
Another vehicle or a motorcyclist, pedestrian, or cyclist is only partially visible.
-
The vehicle ahead is a bus, heavy truck, or vehicle with bulky cargo or a trailer.
-
The vehicle or motorcyclist ahead does not have tail lights or has an unusual tail light configuration.
-
When the vehicle is being towed by another vehicle
-
When the rear of the vehicle ahead is small or not clearly visible (e.g., the vehicle ahead is driving at an angle, only the side of the vehicle is visible, or the vehicle is overturned)
-
If the ground clearance of the vehicle in front is low or high
-
A vehicle, motorcyclist, pedestrian, or cyclist suddenly crosses ahead of your vehicle.
-
When an object enters the front blind spot of a cab-over type vehicle
-
When shapes projected onto road moisture or reflective surfaces are recognised as objects
-
When small particles with colours different from the road surface, such as sand, contaminate the road
-
When the type of detected object differs from the actual object
-
The front radar sensor is damaged or out of position.
-
The temperature near the front radar is high or low.
-
When passing through tunnels or near bridges
-
You are driving in areas where there are few vehicles or structures, such as a desert or meadow.
-
You are driving near areas with a lot of metal, such as a construction zone, railroad, or road with metal plates.
-
If objects such as guardrails or nearby vehicles, which reflect well to the front radar, are present nearby
-
If the detected object is made of a material that does not reflect well to the front radar
-
If there are low or small obstacles in front of the vehicle
-
When the front vehicle or two-wheeler is recognised late
-
When the front vehicle or two-wheeler is suddenly blocked by an obstacle and cannot be detected
-
When the front vehicle or two-wheeler changes lanes late or decelerates abruptly
-
When the angle of the front vehicle or two-wheeler is significantly skewed
-
When a large amount of snow is on the front vehicle
-
When the vehicle deviates from or returns to the lane
-
When the vehicle’s driving is unstable
-
When the front vehicle or two-wheeler cannot be detected whilst the vehicle is turning
-
When the vehicle continues to turn
-
When the front vehicle or two-wheeler has an unusual shape
-
When the front vehicle or two-wheeler is on a hill or downhill road
The following illustration shows the kinds of images of a vehicle, motorcyclist, pedestrian, or cyclist that the front view camera and front radar can detect:
 OMQ4A055001 |
The system may not detect a pedestrian or cyclist ahead that is:
-
Leaning over or not walking fully upright.
-
Wearing clothing or equipment that makes them difficult to detect.
-
Moving very quickly ahead of your vehicle.
-
Short or crouching.
-
Moving opposite of the flow of traffic or having impaired mobility.
-
Part of a large crowd ahead of your vehicle.
-
Difficult to distinguish from their surroundings.
-
When passing pedestrians, bicyclists, traffic signs, or structures near an intersection.
The system may not detect a pedestrian, motorcyclist or cyclist ahead when you are driving:
-
Through steam, smoke, or shadow.
-
Driving through a tunnel or steel bridge
-
In large areas where there are few vehicles or structures, such as a desert, field, or suburban area.
-
In a parking lot.
-
Through a tollgate, construction area, or rough or bumpy terrain.
-
Near areas with a lot of metal, like a construction zone or railroad.
-
On a steep or curving road.
-
Through a roadside with trees or street lights.
-
Along a narrow road with dense trees or overgrowth.
-
Through electromagnetic waves, such an area with strong radio waves or electrical noise.
-
If the vehicle is moving unstably or swaying severely
-
If the vehicle height changes significantly due to abnormal tyre pressure or excessive loading in the cargo area
-
A snow chain, spare tyre, or wheel of a different size is installed
Junction Crossing, Lane-Change Oncoming, Lane-Change Side, Evasive Steering Assist function: (if equipped)
The Junction Crossing, Lane-Change Oncoming, Lane-Change Side, and Evasive Steering Assist functions may operate abnormally or unexpectedly in certain circumstances, including the following:
-
The temperature around the front or rear side radar is too high or too low
-
You have installed a trailer or carrier near the rear corner radar.
-
The front or rear corner radar is covered with snow, rain, dirt, and so on.
-
The bumper around front corner or rear corner radar is covered with objects, such as a bumper sticker, bumper guard, bike rack, etc.
-
The bumper near the front or rear corner radar is damaged, or the radar is out of position.
-
The front or rear corner radar is blocked by other vehicles, walls, or pillars.
-
You are driving on a highway ramp.
-
You are driving on a road with a high guardrail or wall.
-
Another vehicle or motorcyclist drives very close behind or passes close by your vehicle.
-
Another vehicle or motorcyclist passes you at a very high speed.
-
Your vehicle passes another vehicle or motorcyclist.
-
You are accelerating at the same rate as a vehicle or motorcycle in the next lane.
-
A vehicle or motorcycle moves into or out of the lane next to you, or you move into the lane next to another vehicle.
-
If the other vehicle or two-wheeled vehicle moves from the adjacent lane to the lane next to it, or from the lane next to it back to the adjacent lane
-
The function detects a motorcycle or bicycle.
-
The function detects a flat trailer.
-
The function detects a large vehicle, such as a bus or truck.
-
The function detects a small moving obstacle, such as a pedestrian, animal, shopping cart, or stroller.
-
The function detects a shorter vehicle, such as a sports car.
-
In the following cases, the system may be unable to detect the lane or lane markings:
-
When there are no lane markings and only a curb is present.
-
When driving on a bus-only lane or the lanes adjacent to a bus-only lane.
-
When lane markings are complicated or replaced by temporary structures in construction zones.
-
When lanes are not clearly visible due to foreign substances such as rain, snow, dust, sand, oil, or standing water.
-
When the lane width is extremely narrow or wide.
-
When there are surface markings such as zigzag lines, crosswalks, or road guide symbols.
-
When two or more lane markings appear, such as in construction zones or exclusive lanes.
-
When driving through areas where lanes merge or the number of lanes changes.
-
When the road surface is wet or there is insufficient contrast between the lane and road color.
-
When there are traces or markings near the lane that resemble lane markings.
-
When shadows from roadside objects such as medians, guardrails, sound barriers, or vegetation cover the lane.
-
When lanes suddenly disappear or become unclear at intersections.
-
When the distance to the vehicle ahead is very short or the vehicle ahead blocks the lane markings.
-
For more information about the limitations of detecting rear corner vehicles and cautions regarding the rear corner sensor, refer to Blind-spot Collision-avoidance Assist (BCA).
-
Driving on a curved road
 N_SP3i25_B10_015_3_IR
N_SP3i25_B10_015_3_IR N_SP3i25_B10_016_3_IR
N_SP3i25_B10_016_3_IRForward Collision-Avoidance Assist may not detect other vehicles, motorcyclists, pedestrians, or cyclists ahead of you when you drive on curved roads. This may result in no warning, braking assist, or steering assist when needed.
When driving on a curve, you must maintain a safe braking distance and, if necessary, steer the vehicle and engage the brake pedal to reduce your speed.
Forward Collision-Avoidance Assist may detect a vehicle, motorcyclist, pedestrian, or cyclist in the adjacent lane or outside of the lane when you drive on a curved road.
If this occurs, Forward Collision-Avoidance Assist may unnecessarily warn you and control the braking or steering. Always monitor traffic conditions.
-
Driving on an incline
 N_SP3i25_B10_017_3_IR
N_SP3i25_B10_017_3_IRForward Collision-Avoidance Assist may not detect other vehicles, motorcyclists, pedestrians, or cyclists ahead of you when you drive uphill or downhill, and adversely affect sensor performance.
The function may not help with warning, braking, or steering when necessary.
Also, Emergency Braking may activate if the function suddenly detects a vehicle, motorcyclist, pedestrian, or cyclist ahead.
Always keep your eyes on the road and steer your vehicle and engage the brake pedal to reduce your driving speed and maintain safe following and braking distances.
-
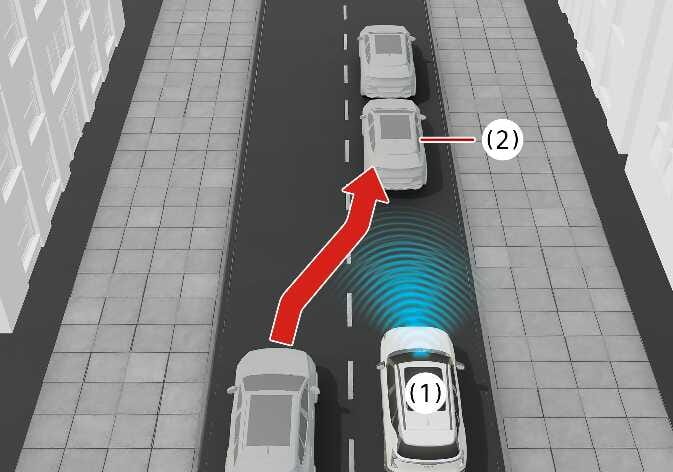
Changing lanes
 N_SP3i25_B10_018_IR
N_SP3i25_B10_018_IR-
Your vehicle
-
Lane changing vehicle or motorcyclist
When a vehicle or motorcyclist (2) moves into your lane from an adjacent lane, it will not be detected until it is within the sensor’s range.
Forward Collision-Avoidance Assist may not immediately detect a vehicle or motorcyclist when it changes lanes abruptly. In this case, you must maintain a safe braking distance and, if necessary, steer your vehicle and engage the brake pedal to reduce your speed.
 N_SP3i25_B10_019_IR
N_SP3i25_B10_019_IR-
Your vehicle
-
Lane changing vehicle or motorcyclist
-
Same lane vehicle
When a vehicle (2) ahead of you merges into another lane, Forward Collision-Avoidance Assist may not immediately detect a vehicle or motorcyclist (3) that is now ahead of you. In this case, you must maintain a safe braking distance and, if necessary, steer your vehicle and engage the brake pedal to reduce your speed.
-
-
Detecting a vehicle
 N_SP3i25_B10_020_1_IR
N_SP3i25_B10_020_1_IRIf the vehicle ahead of yours has cargo extending backward from the cab or high ground clearance, pay special attention. Forward Collision-Avoidance Assist may not be able to detect the cargo extending from the vehicle. In this case, you must maintain a safe braking distance from the rearmost object and, if necessary, steer your vehicle and engage the brake pedal to reduce your speed.
-
When you are towing a trailer or another vehicle, turn OFF Forward Collision-Avoidance Assist for safety reasons.
-
Forward Collision-Avoidance Assist may activate if it detects objects similar to vehicles, motorcyclists, pedestrians, or cyclists.
-
Forward Collision-Avoidance Assist does not activate for carts, bicycles, or other objects pushed or pulled by pedestrians or cyclists.
-
Forward Collision-Avoidance Assist may not operate normally if there is strong electromagnetic interference.
-
Forward Collision-Avoidance Assist may not activate for 15 seconds after you start the vehicle or initialize the front view camera.
For more information about the limitations of detecting rear corner vehicles and cautions regarding the rear corner sensor, refer to Blind-spot Collision-avoidance Assist (BCA).