







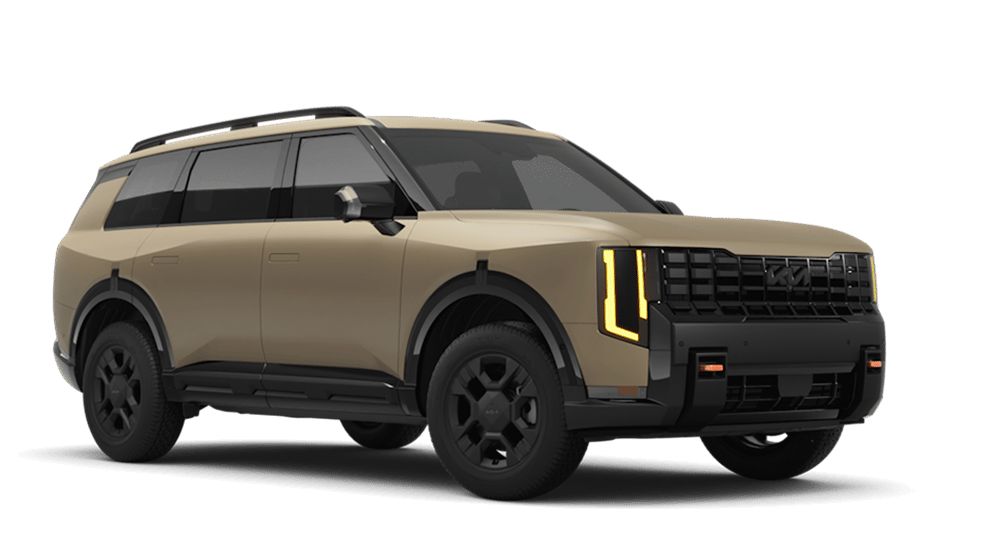















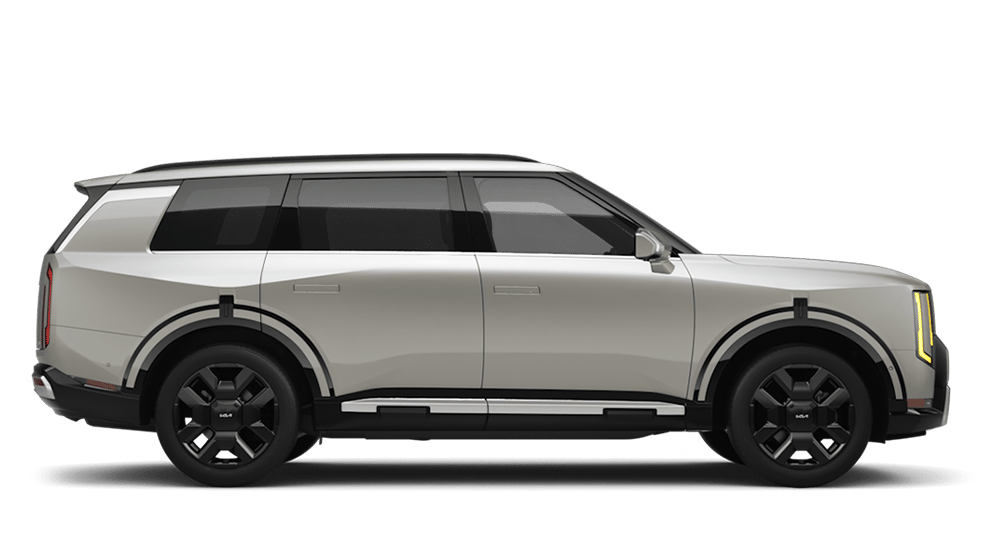

















The all-electric 2026 EV9 is a bold embodiment of luxury with ample cargo and passenger room, advanced technology, up to 379 hp, 516 lb.-ft. of torque, and confidence-inspiring acceleration. With impressive fast-charging capabilities, seating for up to 7 adults, and an available 7.8 in. of ground clearance, the Kia EV9 fuses capable SUV attitude with the power of an EV.1